Plateforme robotique et interactions
Les robots à câbles
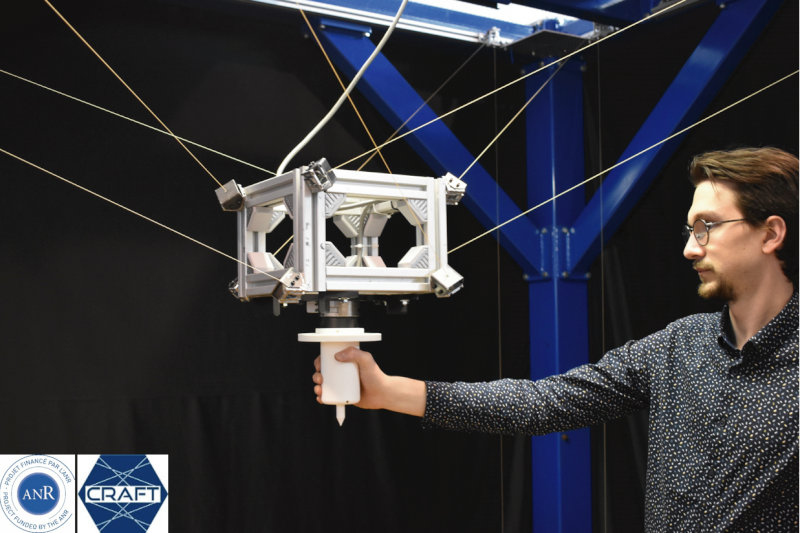
Le prototype CRAFT localisé dans la halle robotique du Laboratoire des sciences du numérique de Nantes (LS2N) à Centrale Nantes est un robot parallèle à câbles composé de huit actionneurs, de huit câbles, d'une plateforme mobile et de capteurs permettant de mesurer les tensions dans les câbles. Ce prototype est principalement dédié à des tâches de robotique collaborative dans de grands espaces tout en étant modulaire et reconfigurable selon la tâche à réaliser.
Les robots parallèles à câbles sont caractérisés par une charge utile élevée, un large espace de travail en translation tout en ayant des inerties réduites. Ces atouts permettent d’utiliser les robots parallèles à câbles pour plusieurs applications telles que la manutention et l’assemblage précis de pièces de grandes dimensions et de masse importante, la fabrication additive de pièces de grandes dimensions, la dépose de fibres pour la réalisation de pièces composites.
Le développement du prototype CRAFT a été soutenu par le projet CRAFT de l'ANR, subvention ANR-18-CE10-0004, et par le projet européen COVR ROCABLE, COVR Grant agreement ID : 779966 Financé sous H2020-EU.2.1.1

Les robots parallèles à câbles sont caractérisés par une charge utile élevée, un large espace de travail en translation tout en ayant des inerties réduites. Ces atouts permettent d’utiliser les robots parallèles à câbles pour plusieurs applications telles que la manutention et l’assemblage précis de pièces de grandes dimensions et de masse importante, la fabrication additive de pièces de grandes dimensions, la dépose de fibres pour la réalisation de pièces composites.
Le développement du prototype CRAFT a été soutenu par le projet CRAFT de l'ANR, subvention ANR-18-CE10-0004, et par le projet européen COVR ROCABLE, COVR Grant agreement ID : 779966 Financé sous H2020-EU.2.1.1
Robotique bio-inspiré
L’équipe robotique et vivant du Laboratoire des sciences du numérique (LS2N) a développé de fortes compétences dans le domaine de la biorobotique au travers de projets concernent principalement les modes de locomotion bio-inspirés tels la nage des poissons, la reptation des serpents, le vol battu des insectes... ainsi que la perception par champs électriques.
Le LS2N s’appuie sur le démonstrateur AviNeck afin de valider les modèles, les simulateurs et les contrôleurs robotiques capables de reproduire les fonctions du cou des oiseaux et de transférer ces connaissances à des solutions de conception en établissant un pont entre la biologie et la robotique. Pour le roboticien, le cou des oiseaux est un manipulateur hyper-redondant embarqué sur un système de locomotion mobile.
Le LS2N s’appuie sur le démonstrateur AviNeck afin de valider les modèles, les simulateurs et les contrôleurs robotiques capables de reproduire les fonctions du cou des oiseaux et de transférer ces connaissances à des solutions de conception en établissant un pont entre la biologie et la robotique. Pour le roboticien, le cou des oiseaux est un manipulateur hyper-redondant embarqué sur un système de locomotion mobile.
Financements
